Przedmiotem wynalazku jest sposób obróbki koła zębatego walcowego o dowolnym zarysie z modyfikacją wzdłużną linii zęba. Sposób według wynalazku stanowi proces technologiczny wytwarzania kół zębatych polegający na obróbce zębów koła zębatego przy użyciu prostego narzędzia z wykorzystaniem obrabiarki sterowanej numerycznie, pozwalający na uzyskanie w sposób wydajny gotowego wyrobu – koła zębatego.
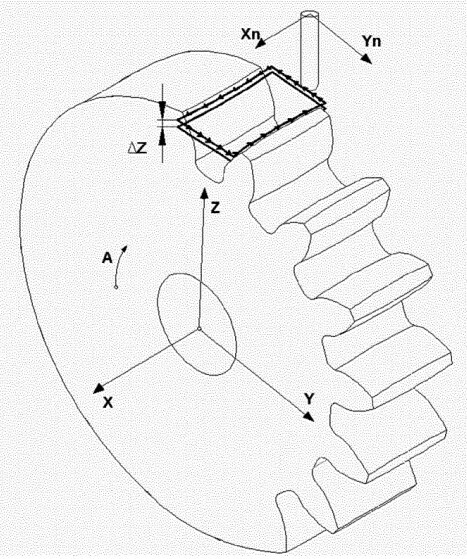
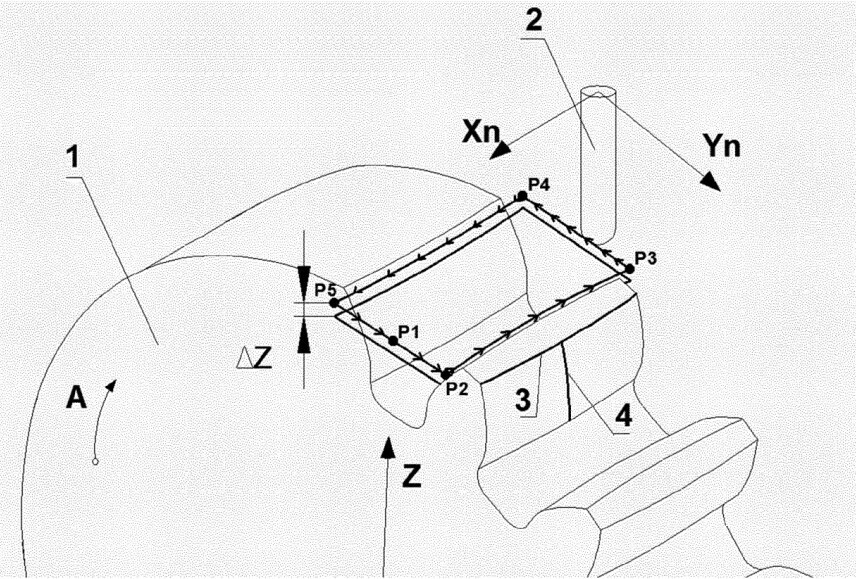
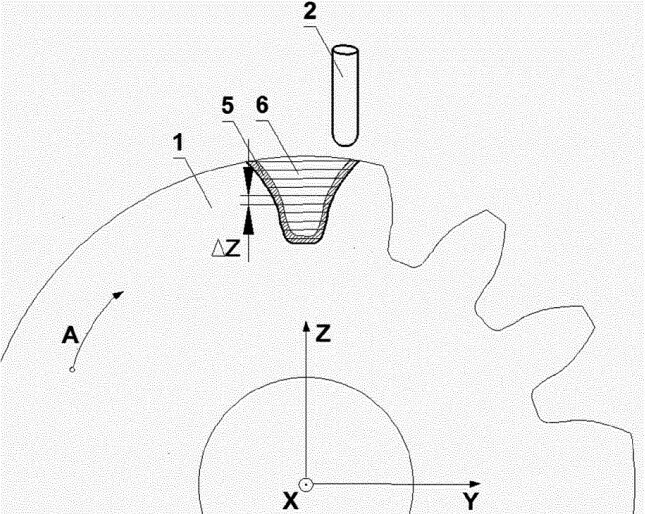
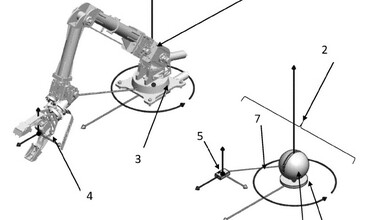
Przedmiotem wynalazku jest sposób obróbki koła zębatego walcowego o dowolnym zarysie z modyfikacją wzdłużną linii zęba na obrabiarce sterowanej numerycznie. Sposób polega na tym, że otoczka koła zębatego mocowana jest w uchwycie na obrabiarce sterowanej numerycznie w pięciu osiach X+Y+Z+A+C, gdzie początek układu współrzędnych przedmiotu obrabianego (X, Y, Z) jest umiejscowiony w dowolnym punkcie związanym geometrycznie z osią obrotu koła zębatego, następnie frez walcowy z zakończeniem kulistym na skutek powiązania ruchów Xn, Yn przemieszczając się w obszarze wrębu międzyzębnego usuwa naddatek w jednej płaszczyźnie zdefiniowanej w kierunku osi Z i narzędzie przemieszcza się ruchem roboczym usuwając materiał współbieżnie pomiędzy punktami P2-P5 oraz P3-P4, zwiększając odpowiednio odległość pomiędzy punktami do momentu usunięcia całego naddatku w płaszczyźnie obróbki, a podczas obróbki pozostawiony zostaje naddatek wykończeniowy w postaci ekwidystanty tworzącej linię zęba i zarys zęba a obróbka kształtowania zarysu zęba polega na obniżaniu płaszczyzny obróbki w kierunku osi Z o wartość ΔZ adekwatną do rodzaju obróbki zgrubnej lub wykończeniowej i wielkości wrębu międzyzębnego koła zębatego, przy czym powiązanie ruchów Xn, Yn w obróbce zgrubnej przebiega w ten sposób, że narzędzie przemieszcza się ruchem roboczym usuwając materiał w płaszczyźnie obróbki pomiędzy bokami wrębów obrabianych zębów, a podczas obróbki pozostawiony zostaje naddatek wykończeniowy w postaci ekwidystanty tworzącej linię zęba i zarys zęba i obróbka odbywa się poprzez obniżanie płaszczyzny obróbki w kierunku osi Z o wartość ΔZ, zaś powiązanie ruchów Xn, Yn w obróbce wykończeniowej przebiega w ten sposób, że narzędzie przemieszcza się w płaszczyźnie obróbki pomiędzy bokami zębów usuwając wyłącznie naddatek pozostawiony w formie ekwidystanty na bokach zębów i obróbka odbywa się poprzez obniżanie płaszczyzny obróbki w kierunku osi Z o wartość ΔZ, a ponadto kształtowanie linii zęba przebiega w ten sposób, że narzędzie (2) na skutek powiązania ruchów Xn, Yn przemieszczając się w obszarze wrębu międzyzębnego usuwa naddatek w jednej płaszczyźnie zdefiniowanej w kierunku osi Z i narzędzie przemieszcza się ruchem roboczym usuwając materiał współbieżnie pomiędzy punktami P2-P5 oraz P3-P4, zwiększając odpowiednio odległość pomiędzy punktami do momentu usunięcia całego naddatku w płaszczyźnie obróbki, natomiast kształtowanie zarysu zęba polega na obniżaniu płaszczyzny obróbki w kierunku osi Z o wartość ΔZ.
| Tytuł | Sposób obróbki koła zębatego walcowego o dowolnym zarysie z modyfikacją wzdłużną linii zęba |
| Numer zgłoszenia w UP | P.439424 |
| Numer prawa wyłącznego | Pat.248408 |
| Data zgłoszenia do UP | 2021-11-04 |
| Data udzielenia prawa | 2025-09-23 |
| Status w UP | Prawo w mocy |
Przedmiotem zgłoszenia jest śluza do załadunku sieczki zwłaszcza do podajnika ślimakowego, która charakteryzuje się tym, że składa się z łącznika (1) w kształcie walca i przekroju koła z czterema dwudzielnymi przegrodami (10) rozmieszczonymi równomiernie
Przedmiotem wynalazku jest kontroler manipulatora, stosowany zwłaszcza w pojazdach wielozadaniowych takich jak łaziki marsjańskie czy pojazdy saperskie. Kontroler manipulatora posiada podstawę z osadzoną na niej obudową zewnętrzną (46) w kształcie ściętej
Wydział Inżynierii Mechanicznej i Informatyki
Inżynieria mechaniczna
Copyright © Politechnika Częstochowska. Wszystkie prawa zastrzeżone.